Process Control (engineering)
Process control is the engineering discipline concerned with maintaining process variables (temperature, pressure, flow rate, composition) at desired setpoints by manipulating control variables through feedback and feedforward control strategies. A typical feedback control loop consists of a sensor, controller (commonly PID), and final control element (valve or pump) that continuously corrects deviations from setpoint. It is essential in chemical plants, oil refineries, pharmaceutical manufacturing, and food processing to ensure product quality, process safety, and energy efficiency.
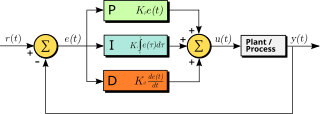
Key Formula
u(t) = Kp×e(t) + Ki×∫e(t)dt + Kd×de(t)/dt
LaTeX: u(t) = K_p e(t) + K_i \int_0^t e(\tau)d\tau + K_d \frac{de(t)}{dt}
| Symbol | Meaning | Unit |
|---|---|---|
| u(t) | Controller output (manipulated variable) | varies (e.g., valve %) |
| e(t) | Error = setpoint − measured value | same as process variable |
| K_p | Proportional gain | dimensionless |
| K_i | Integral gain | per second (1/s) |
| K_d | Derivative gain | seconds (s) |
Worked Example
Problem
A temperature controller has Kp = 2.5, Ki = 0.5 s⁻¹, Kd = 0.1 s. At time t, the setpoint is 150 °C, the measured temperature is 145 °C, the integral of error over time is 8 °C·s, and the rate of change of error is −0.5 °C/s. Calculate the controller output.
Solution
Step 1: Error e(t) = 150 − 145 = 5 °C. Step 2: Proportional term: Kp × e = 2.5 × 5 = 12.5. Step 3: Integral term: Ki × ∫e dt = 0.5 × 8 = 4.0. Step 4: Derivative term: Kd × de/dt = 0.1 × (−0.5) = −0.05. Step 5: u(t) = 12.5 + 4.0 + (−0.05) = 16.45.
Answer
Controller output u(t) = 16.45 (in controller output units, e.g., % valve opening)
Effects of PID Tuning Parameters on Control Response
| Parameter Increase | Rise Time | Overshoot | Settling Time | Steady-State Error |
|---|---|---|---|---|
| Increase Kp | Decrease | Increase | Small change | Decrease |
| Increase Ki | Decrease | Increase | Increase | Eliminate |
| Increase Kd | Minor change | Decrease | Decrease | Minor change |
| High Kp only | Fast | High | Long | Residual error |
| Optimal PID | Moderate | Minimal | Short | Zero |
Interactive Tools
Wikimedia Commons, CC BY-SA
Related Terms
Chemical Reactor Design
Chemical reactor design is the discipline of selecting and sizing reactor vessels that achieve a desired chemical conversion at specified conditions of temperature, pressure, and flow rate. It integrates reaction kinetics, thermodynamics, and transport phenomena to predict concentration and temperature profiles within the reactor. Industrial applications range from petroleum refining and polymer synthesis to pharmaceutical manufacturing and environmental remediation.
Pressure Drop
Pressure drop (ΔP) is the reduction in fluid pressure between two points in a flow system due to frictional resistance from pipe walls, fittings, valves, packed beds, or other flow restrictions. It determines the pumping or compression power required to maintain flow and is a critical factor in the economic design of pipelines, heat exchangers, distillation columns, and catalytic reactors. For incompressible flow in pipes, the Darcy-Weisbach equation relates pressure drop to fluid velocity, pipe geometry, and friction factor.
Heat Transfer Coefficient
The heat transfer coefficient (h) is a proportionality constant that quantifies the rate of heat transfer per unit area per unit temperature difference between a surface and a fluid in contact with it. It combines the effects of conduction through the fluid boundary layer and convection driven by fluid motion, making it central to the design of heat exchangers, reactors, and process equipment. Higher values indicate more efficient heat transfer, and the coefficient depends strongly on fluid properties, flow velocity, geometry, and surface roughness.
"Process" from Latin "processus" (advance, progress). "Control" from Latin "contra rotulus" (counter-roll, a record). Feedback control theory was developed by James Watt (flyball governor, 1788), formalised by Minorsky (PID, 1922), and systematised by Ziegler and Nichols (1942) with their famous tuning rules still used today.